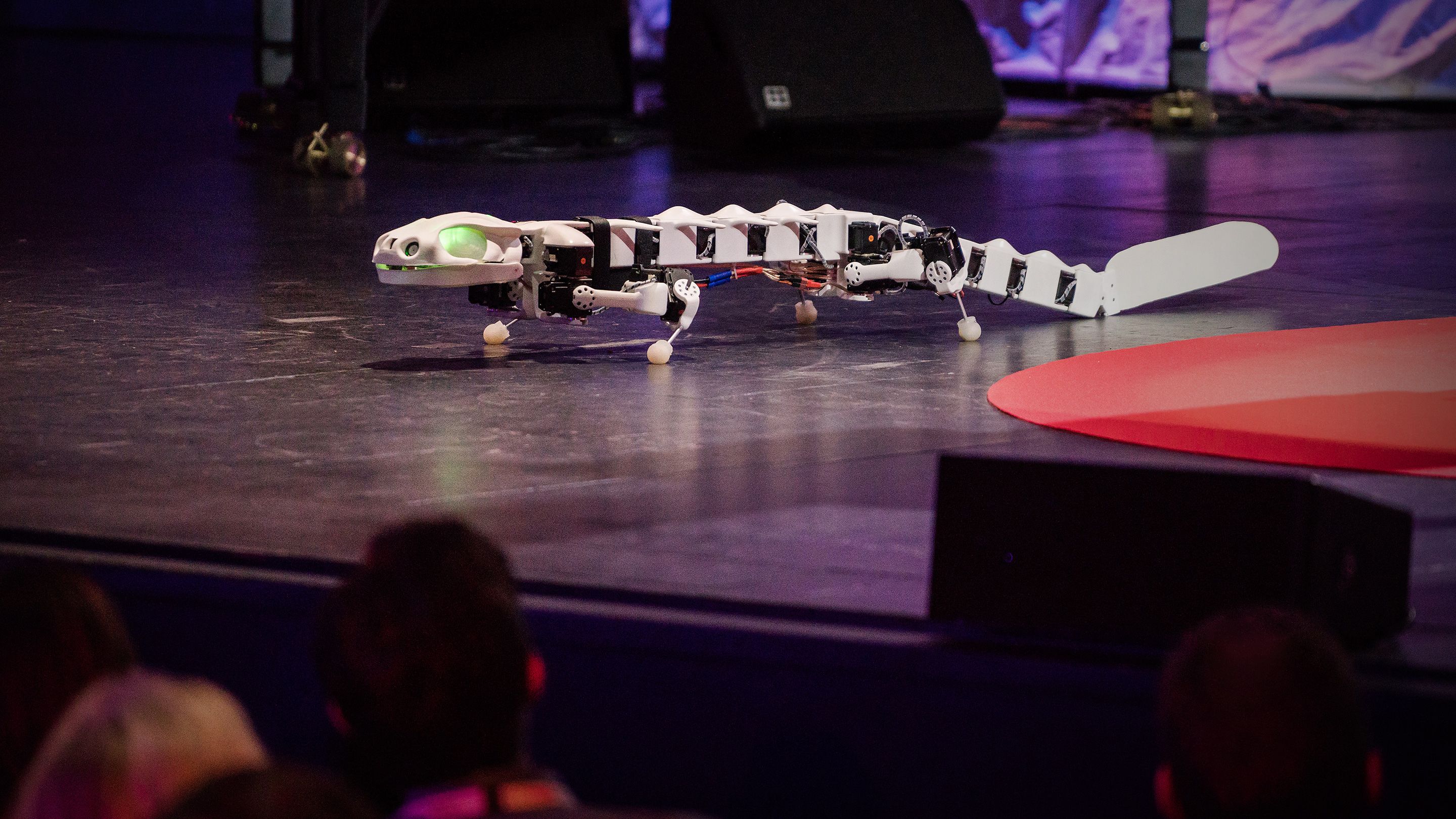
A robot that runs and swims like a salamander
2,093,962 views |
Auke Ijspeert |
TEDGlobal>Geneva
• December 2015
Roboticist Auke Ijspeert designs biorobots, machines modeled after real animals that are capable of handling complex terrain and would appear at home in the pages of a sci-fi novel. The process of creating these robots leads to better automata that can be used for fieldwork, service, and search and rescue. But these robots don't just mimic the natural world -- they help us understand our own biology better, unlocking previously unknown secrets of the spinal cord.